




Description
The Skipper is a very sensitive wheelchair controller that is based on a force sensor. Other controllers are based on a joystick that needs a force and some movement to operate. The Skipper can be operated by force alone without any perceptible movement. For some wheelchair users this can be a game-changing property.
The control stick of the Skipper is removable. It can be rigid or flexible. With the rigid version the Skipper operates like a true force stick. With the flexible version it operates like a normal joystick. The amount of movement for a particular operating force depends on the stiffness of the spring in the flexible stick. Shannon can provide sticks with different spring stiffnesses.
The force necessary to obtain full output is adjustable from 10 grams to 700 grams. The adjustment can be made by the wheelchair dealer with a wireless programmer while the user is free to drive around. In this way the optimal setting for a particular user can be found quickly and easily.

Another unique feature of the Skipper is an adjustable non-linear relationship between input force and wheelchair speed. Usually this relationship is linear: a 10% increase of the input gives a 10% increase of the speed. However, the users’ perception of a 10% speed increase depends on the current wheelchair speed. A speed increase from 0% to 10% is highly noticeable but an increase from 90% to 100% hardly is.
The Force/Speed relationship of the Skipper is adjustable in such a way that, for the same force increase, the speed increase gets larger as the speed gets higher. The user may experience this as more precise control at low speed and a more responsive stick at high speed. The optimal individual adjustment can be made by the dealer in the same way as the operating force.
Finally, the Skipper has an adjustable low-pass filter that may be useful for people who have to deal with a tremor. This filter does not affect slow input changes but suppresses fast changes. The optimal adjustment can be made by the dealer. All adjustments made by the dealer are stored in the Skipper and remain unchanged until readjustment.
removable sticks
The removable sticks can be screwed on the skipper body, which has a fixed m4 stub. A rigid stick comprises two halves that are firmly held together with strong magnets. If the applied force gets strong enough to potentially damage the sensor (or the user), the magnets give way and the stick breaks. A broken stick will automatically repair itself because of the magnetic attraction. Some users temporarily remove the upper half or the whole stick because it gives them a flat surface to work on.

The two halves of a flexible stick are connected by a spring. It is operated by both force and movement, similar to a regular joystick. The standard option is a flexible stick that moves 5 mm with a force of 150 grams. In special cases, Shannon can provide sticks with different spring stiffness.

- Based on a very sensitive inductive force sensor.
- Operation by force alone or by force and movement.
- Removable rigid or flexible sticks available.
- Rigid sticks are for control by force without movement.
- Rigid sticks break at a controlled force to protect the sensor and the user. It will automatically restore itself because of built-in magnets.
- Flexible sticks make the Skipper behave like a normal joystick.
- Various combinations of force and movement possible.
- Minimum force necessary for full output 10 grams.
- Maximum force for full output adjustable to 700 grams.
- Adjustable non-linear Force/Speed relationship gives users more precise control at low speed and more responsive control at high speed.
- Adjustable tremor damping low pass filter.
- A dealer can make adjustments with a wireless programmer while the user drives around freely. Optimal values found quickly and easily.
- During adjustment, the dealer can stop the wheelchair immediately if anything goes wrong. This means safety for an inexperienced user.
- Automatic compensation of sensor drift caused by temperature changes.
- Automatic protection against unwanted wheelchair movement if the stick is outside the zero position on power up.
- Compatible with the R-net Omni joystick standard.
Adjusting the properties
For dealers of The Skipper, a special wireless programming interface is available. This interface comprises a USB dongle for a laptop or PC and a programmer box to be installed between The Skipper and the wheelchair. The dongle and the programmer are linked via built-in radio modules.
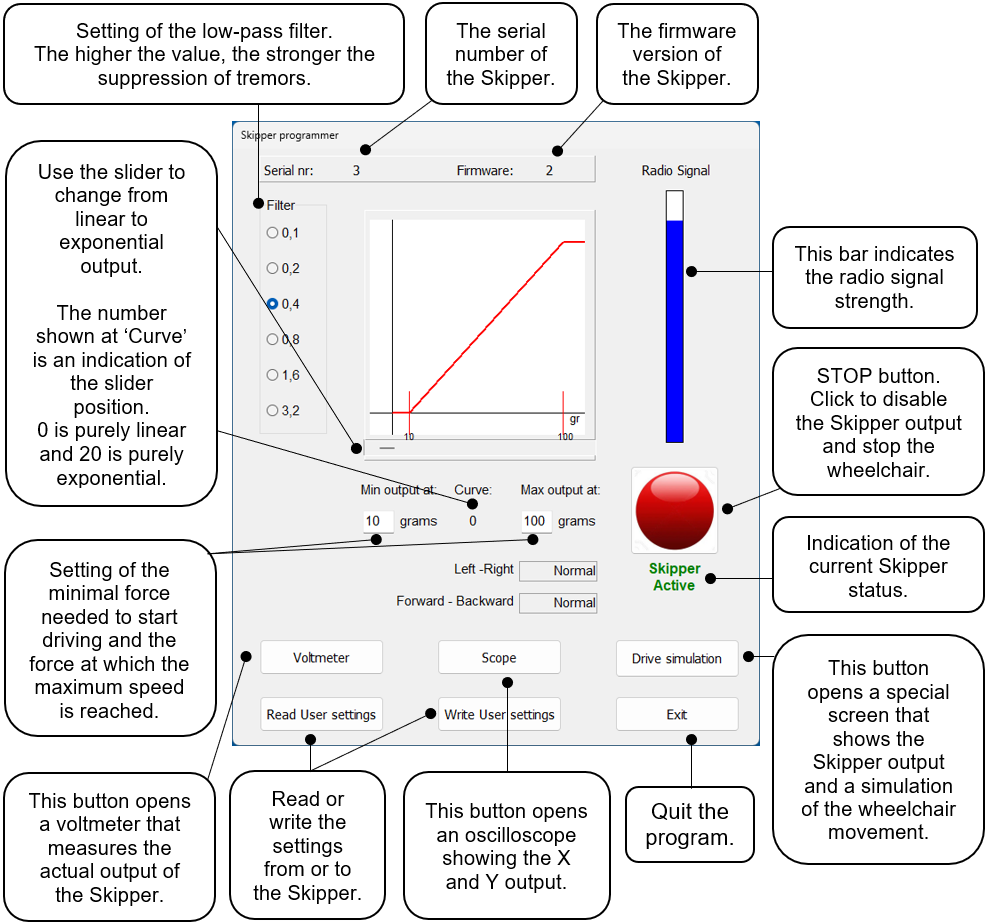
The adjustment program
With a special Windows program, various settings of the Skipper can be adjusted while the user is free to drive around. Because the dealer gets instant feedback from the user about the effect of an adjustment, the optimal values can be found quickly and easily. The maximum working distance between the laptop and the wheelchair is at least 25 meters and usually more. If the radio link fails, the wheelchair stops automatically. If anything goes wrong, the dealer can stop the wheelchair immediately.
Linear or exponential output
In most wheelchair controllers, the relationship between input force and wheelchair speed is linear. This means that if the input force is half the maximum, the speed is also half the maximum. With the Skipper, the relationship between force and speed can be adjusted to be non-linear. In that case, half the maximum force gives less than half the maximum speed but the maximum force still gives the maximum speed.
The Skipper has this feature because a users’ perception of a particular change in speed depends on the current speed. A speed increase from 0% to 10% is highly noticeable but an increase from 90% to 100% hardly is. The effect of a particular change of the input force at low speed is much more noticeable than the same input change at high speed.
To the user, linear control feels more sensitive at low speed and less sensitive at high speed. With non-linear control the sensitivities at low speed and high speed feel more equal. Precise steering at low speed gets easier and the control feels more responsive at high speed.
If the Skipper is set to linear output, the wheelchair speed at half the maximum input is half the maximum speed. If you draw the relation between input force and wheelchair speed, you get a straight line, as shown in the figure. Notice that the line does not start at zero force but at some threshold value. All wheelchair controllers have this feature. It prevents the motors from reacting to unavoidable small deviations from zero output at zero input because of manufacturing tolerances, temperature effects, aging, etc.
If the Skipper is set to non-linear output, the speed at half the maximum input is less than half the maximum speed. If you draw the relation between input force and wheelchair speed, you get a curved line. The curvature can be continuously adjusted between linear and exponential. In the last case, every extra gram of force multiplies the speed with a constant factor.
The amount of curvature has a number from 0 (linear) to 20 (pure exponential) on the laptop. A value of 5 to 10 may be optimal for the average user. This can only be determined in practice. Experienced wheelchair users, who are used to linear control, will probably have to get used to non-linear control. For them, linear control always remains an option with the Skipper.